Replacing humans in work degrading conditions
At TeknTrash, we have developed a humanoid called ALPHA (Automated Large Processing Humanoid Assistant): robots designed to work at dangerous and unsanitary places such as recycling plants
For example, at recycling plants, humans sort waste at an average rate of 30 to 40 picks per minute, but fatigue and decision fatigue lead to errors. Contamination items mixed with recyclables remains a persistent issue, with single-stream recycling (where all recyclables are collected in one bin) resulting in about 25% of material being contaminated, rendering it unsellable. In 2022, England dry recycling declined by 7.1% (0.4 million tonnes), partly due to quality issues affecting resale value.
Robots, by contrast, achieve higher purity rates, reducing bale rejection rates and boosting profitability. And this is one of the benefits of the humanoid we are developing: a humanoid able to work anywhere where humans shouldn't: picking it up from the conveyor belts, carrying volumes to the truck, lifting up weights in processing plants, etc.
For we believe waste handling is unsafe, unsanitary, repetitive, and overall degrading: thus the perfect spot for a robot.
In fact, the waste and recycling sector is among the most hazardous industries in the UK: in the 2018/19 period, 4.5% of workers in this sector suffered from work-related ill health, a figure notably higher than the all-industry average of 3.1%. Additionally, the rate of non-fatal workplace injuries stood at 3.4%, surpassing the 1.8% average across all industries. Alarmingly, the sector's fatal injury rate is 17 times higher than the all-industry average, with seven fatal injuries reported in 2018/19ALPHA is, thus, a thorough solution which offers enormous advantages for the industry, society, and the environment
Top differentiators
1. Uses hyperspectral cameras to increase recognition due to the use of frequencies beyond the regular color spectrum (UV, X-ray, infrared, etc)
2. Cameras located at the start of the conveyor belt tracking waste as it moves and allocating it to robots along the line
3. Robots pick up the waste as instructed using grippers instead of suction cups which require constant cleaning
4. Robots have freedom of movement instead of solutions which are fixed and therefore cannot grab missed waste
5. ALPHA is truly a humanoid and, thus, ultimately designed to replace humans in all work aspects of recycling plants
Technical Characteristics
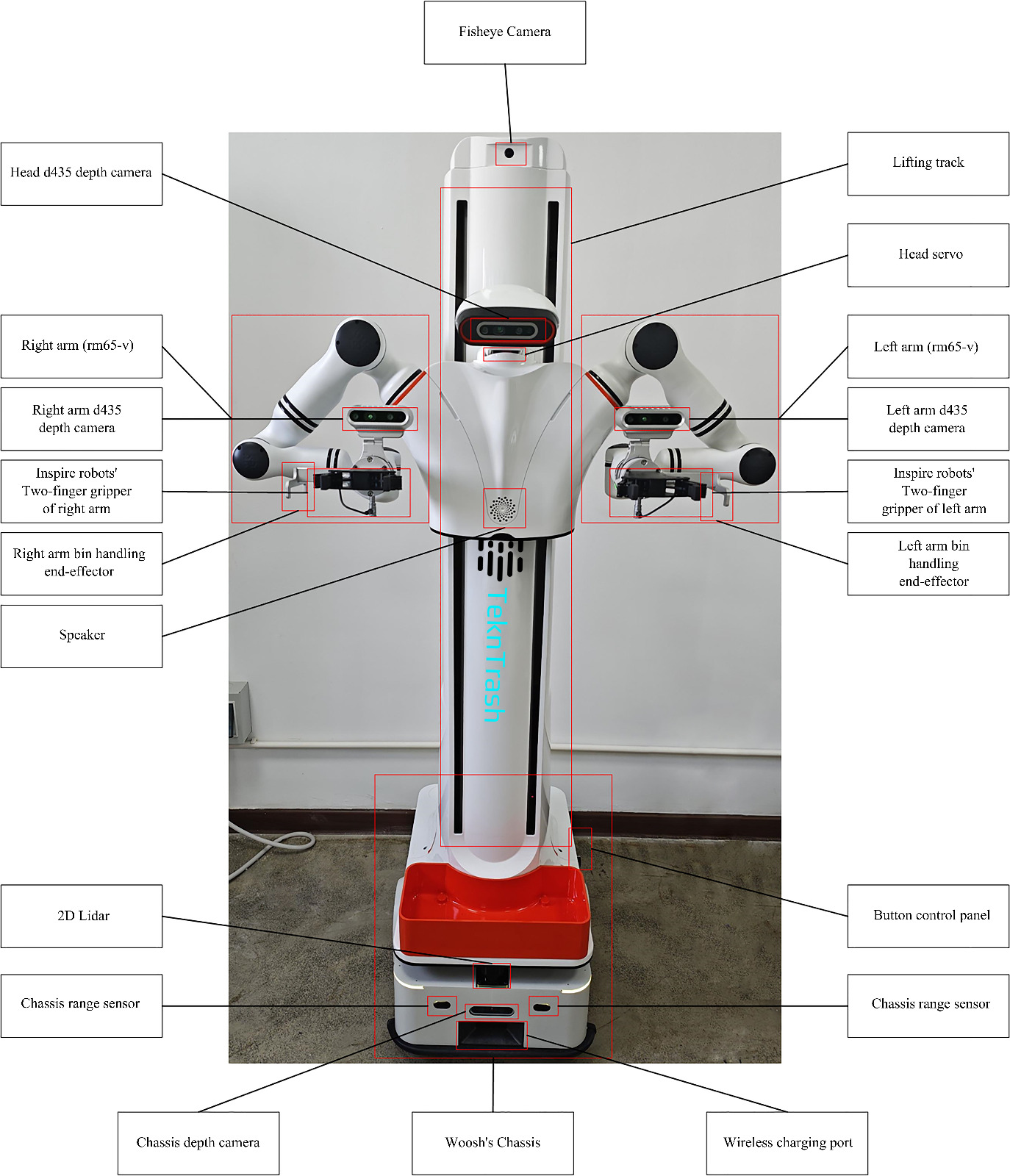
Overall - Composed of a chest with 2 arms, a head, a lifting column, and a wheeled base, it can operate for up to 7 hours and charge in 3Lifting module - Installed on the top surface of the mobile base, the lifting module can go up and down 1 metre to ensure that the arms operate at a 2000mm maximum height, and 150mm/s maximum lifting speed. A monocular camera is installed at the center top back of the lift column. At about 1500mm above the ground, and has a monocular camera and microphone
Dual Arms - Each arm has 6 DOF, is fitted with a gripper, and between both they are able to lift up to 5 Kg, and a 3D camera with a field of view of 85 degrees horizontal * 58 degrees vertical and a depth range of 0.25 to 2.5m
Base - Carries functions such as autonomous navigation, autonomous motion, and autonomous obstacle avoidance, providing data such as lidar, depth camera, ultrasonic sensor, motor encoder, and IMU through API and HTTP protocols, and adjust the parameters. The base can process navigation, dynamic obstacle avoidance, autonomous positioning, map construction, and automatic charging. For navigation it employs a deep learning sensor camera, lidar, 1 ultrasonic safety touch edge and 2 ultrasonic, and 1 IMU+encoder
Head - Composed of pitching joint, rotating joint and binocular depth camera, allows a global perspective for accurately identifying objects and grasp, identifying obstacles around the robot arms or high-position obstacles and avoid block during motion. With 2 DOF, it has a binocular camera
Computing - Provided by a Nvidia Orin AGX with a GPU Ampere architecture with 2048 NVIDIA CUDA cores and 64 Tensor Cores, a CPU 12-core Arm Cortex-A78AE v8.2 64-bit CPU, 3MB L2 + 6MB L3 cache, DL Accelerator 2xNVDLA V2.0, Vision Accelerator PVA v2.0, Storage 64GB eMMC 5.1, Hard Drive 1G SSD, providing 275 TOPS of processing
Connectivity - Designed to work in groups of at least 2 units, ALPHA is permanently connected to the cloud thanks to its wifi interface. The cloud reads from a central camera and tells each unit which function it should perform: this is a radical approach to the usual approach of self-sufficient robots that depend on their sole resources and do not work as a team
Contact us for an assessment
In this demo video we can see ALPHA moving a box. Although it was designed to work primarily at recycling stations, it can perform any action.
In the future ALPHA will not be confined to recycling plants alone, but will operate anywhere waste is being handled: even in your home.
We believe waste should not be handled by humans anywhere: it is dangerous, unsanitary, and simply degrading.
More ALPHA demonstrations
Folding a towel
Hanging clothes
Organising items in a container
Handling test tubes
Storing dishes
Commercial Model
ALPHA is delivered through a RaaS (Robot as a Service) model rather than a traditional product sale. This allows companies to adopt advanced robotics with minimal upfront risk and predictable operational costs.
Commercial Model
Initial implementation
Covers deployment, integration, configuration, onboarding, and operational setup.
Maturity period
During the first 12 months after implementation, there are no additional operational fees, allowing the client to validate performance, optimize workflows, and measure ROI before scaling.
Monthly service fee
Equivalent to the salary cost of the worker ALPHA operates alongside or replaces.
Advantages for the Client
No large capital expenditure
Avoid the usual £100K upfront investment typically associated with robotic-arm-based solutions, which are not humanoid like ALPHA.
Fast ROI validation
The 12-month maturity period enables operational testing and measurable productivity gains before recurring costs begin.
Predictable operational costs
The monthly fee is directly tied to an existing labour benchmark, making budgeting simple and transparent.
Scalable deployment
ALPHA can be expanded across multiple operations without major infrastructure changes.
Reduced operational risk
Continuous support, maintenance, and system improvements are included within the service model.
Improved workforce efficiency
ALPHA works alongside human teams, increasing productivity, consistency, and operational uptime.
Access to continuous innovation
Clients benefit from ongoing software and AI upgrades without purchasing new hardware generations.
FAQ
So… what exactly does ALPHA do?
ALPHA is an AI-powered humanoid robot designed to work at environments where regular robots would break due to being dangerous, unsanitary, etc, such as recycling plants. Whereas other robots would break in a month, ALPHA remain working and are quickly replaced
Is ALPHA just a robot arm?
No. ALPHA is a humanoid with arms, torso, head, wheels, etc. That gives it the ability to move to its work position without requiring installation as happens with the usual robotic-arm-based solutions, identify the waste itself, use its two arms to perform work, and more. For that, ALPHA has AI vision, sensors, conveyor integration, classification software, and automation controls.
Can ALPHA work on any material?
ALPHA can work in any material it is trained on, which of course includes the usual found in waste recycling plants: paper, plastic, metal, and more.
Do we need programmers to operate it?
You do not. Daily operation is controlled by regular facility staff, or you can hire us to control your ALPHA team remotely. In both cases, ALPHA is supported by HoloLab, a comprehensive portal which provides data on its perfomance and allows its control.
Will ALPHA replace all our workers?
Initially, ALPHA is designed to work alongside human teams, but ultimately to replace them, as we believe humans should not work at the places ALPHA is designed to, as they are dirty, unsanitary, unhealthy, dangerous, and basically inhumane
Can ALPHA work nonstop?
Yes. That is one of the huge advantages of ALPHA compared with human workers, who need breaks, vacations, and time away from the line. The only time ALPHA is not working is during scheduled maintenance intervals.
Does ALPHA need internet to work?
Yes, because it has a comprehensive control system called HoloLab monitoring everything it does so we can assure the highest performance.
Can ALPHA learn our waste stream specifically?
Yes. The AI models can be adapted and trained for site-specific materials and workflows.
How long does installation take?
Almost nothing: just a matter of positioning it in its future work location and connecting it to the internet.
What kind of maintenance does it need?
Routine maintenance includes cleaning, inspections, calibration, software monitoring, and occasional hardware servicing.
Can one robot do everything?
No. Industrial automation works best with specialized systems designed for specific tasks.
What makes ALPHA different from normal automation?
ALPHA is adapted and AI-trained for the harsh conditions it was designed for. So, whereas a regular robot may cease functioning in a month, ALPHA is designed to continue working normally.
How accurate is the AI?
Accuracy depends on material type, lighting conditions, contamination levels, and training data quality. ALPHA aims to sort at least as well as a human: 42 picks per minute.
Can ALPHA detect dangerous materials?
It can identify certain hazardous or unwanted objects depending on sensor configuration and training. This is critical for problematic objects such as batteries, which produce fires in recycling plants all the time.
Do we need to redesign our facility?
Not at all. That is one of the big advantages of ALPHA compared with competing sorting solutions based on robotic arms: they need infrastructure changes and may require stopping the conveyor belt, and therefore the company’s entire operation. With ALPHA, you place it where a human would be, connect it to the internet, and it starts working.
Why use robotics in waste management at all?
Because repetitive, hazardous, labor-intensive tasks are difficult to scale efficiently with manual labor alone. And because being behind in technology means being overrun by the competition.